Enhanced Autosteer for Grape Harvesters
Autosteer for Grape Harvesters and other vehicles in agriculture has been available for many years now working on Broadacre
and horticultural farms to autosteer, tractors, Combine harvesters and self‐propelled sprayers.
Various attempts have been made over the years to extend this technology to the vineyard industry.
The main point of failure has come about because of the age of vineyards and the topography they
are planted in. Most of the vineyards in the world were planted prior to the availability or the
application of GPS technology to plant them and are often on steep and undulating land.
How does the harvester steer under manual steering by the operator?
The harvester head is mounted on a pendulum mechanism that essentially swings from the frame of
the machine. Because it is a pendulum when it is in ‘free air’ then it hangs vertically. When it is on the
trellis, the crop pushes the head from side to side following the line of least resistance. The tilt of the
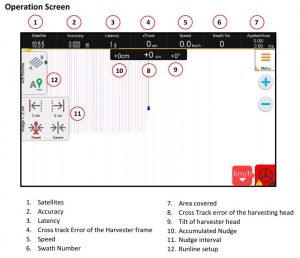
harvesting head is displayed on the screen in the harvester cab. The operator simply steers the
machine so that the harvesting head stays vertical.
How does the autosteer work?
The lack of straight or regular trellis lines for ‘run lines’ is the problem. This is how Precision
Technology’s AgGuide software does the job using GPS autosteer and other technologies to enhance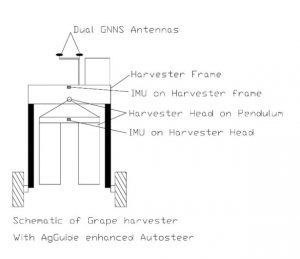
the steering system.
Just like conventional GPS guided auto steerthere is an antenna that collects information
coming in from the GPS, Glonass and Biedousatellites. AgGuide uses two antennas to do this
on a grape harvester. These are set about 1.5metres apart across the machine and help with
the alignment of the machine when it turns at the end of the trellis to approach a new trellis.
An IMU on the harvester frame measures the tilt of the machine and compensates for the slope of
the terrain that the machine is following. It calculates the position of the machine wheels on
the ground from the position of the antennas and the tilt calculated by the IMU.
Second IMU on the Harvester Head.
AgGuide has a second IMU that is mounted on the harvester head. As the harvester moves along the
row, the IMU on the harvester head is always above the trellis because the harvester head is on a
pendulum and always vertical. The calculated position of the IMU on the harvester head and the IMU
on the harvester frame are constantly being compared and the autosteering on the machine is
constantly being nudged automatically to keep the position of the Harvester frame aligned with the
harvesting head.
Either Hydraulic steering (with a wheel angle sensor) or a steering wheel motor (on the steering wheel)
are used to steer the harvester just like conventional GPS guided auto steer.
If there was a good GPS plotted run line to follow, then that would easy, but there isn’t, the trellis and
vines are not regular so following them with GPS alone is not possible.
How to get a run line to follow?
Two choices: ‐
1. Make a run line in the conventional manner either by making an A – B Line or adaptive
curve.
2. Map the vineyard by photogrammetry or Lidar and draw the run lines along the vines on the
trellis. Each trellis is a separate run line that can be followed. In AgGuide individual run lines
can be created and displayed on the screen at once.